-
1 program languages
English-Russian dictionary of computer science > program languages
-
2 programming language
язык программирования
Язык, предназначенный для представления программ.
Примечание
К традиционным языкам программирования процедурного типа относят, как правило, языки для представления программ в виде последовательности предписания
[ ГОСТ 28397-89]Тематики
- обеспеч. систем обраб. информ. программное
- языки программирования
EN
Programming language
Язык, предназначенный для представления программ.
Примечание - К традиционным языкам программирования процедурного типа относят, как правило, языки для представления программ в виде последовательности предписания
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Programming language
Источник: ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > programming language
-
3 programming language
языки программирования - это формальные искусственные языки ( artificial language), которые относятся к широкому классу ПО, называемому "инструментальным ПО" (см. software tool), и предназначены для написания компьютерных программ. Они позволяют программисту выражать обработку данных в символьном виде, избегая в той или иной степени зависимости от конкретного аппаратного обеспечения. В мире насчитывается более четырёх тысяч различных языков программирования. Языки программирования делятся на языки высокого уровня (ЯВУ) и языки низкого уровня, к которым относятся ассемблеры и машинно-зависимые языки. Кроме того, языки программирования бывают декларативными, процедурными, объектно-ориентированными, проблемно-ориентированными, функциональными. Языки программирования с точки зрения их исполнения компьютерной системой делятся также на последовательные (sequential language) и параллельные (concurrent programming language), компилируемые (compiling programming language) и интерпретируемые (interpretive language). Наконец, по области применения ЯВУ делятся на языки общего назначения и специализированные. Каждый язык программирования имеет собственную грамматику (grammar) и синтаксис (syntax).Syn:см. тж. 1GL, 2GL, 3GL, 4GL, 5GL, assembler, compiler, declarative language, dynamic language, formal language, high-level language, interactive language, language, language definition, language extension, language implementation, machine language, OOP, problem-oriented language, procedural language, programming language theory, simulation language, typed language, vocabularyАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > programming language
-
4 keyword
ключевое слово
Информативное слово, приведенное к стандартной лексикографической форме и используемое для координатного индексирования.
[ГОСТ 7.74-96]
ключевое слово
Слово, по которому может осуществляться поиск каких-либо записей или документов.
[ http://www.morepc.ru/dict/]Тематики
EN
DE
FR
ключевое слово (в языках программирования)
Идентификатор, смысл которого зафиксирован правилами языка программирования и который используется для распознавания предложений в программе.
[ ГОСТ 28397-89]Тематики
EN
4. Ключевое слово (в языках программирования)
Keyword
Идентификатор, смысл которого зафиксирован правилами языка программирования и который используется для распознавания предложений в программе
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
37. Ключевое слово КС
D. Schliisselwort
E. Keyword
F. Mot*cle
Слово или словосочетание из текста документа или запроса, которое несет в данном тексте существенную смысловую на-грузку с точки зрения информационного поиска
Источник: ГОСТ 7.27-80: Система стандартов по информации, библиотечному и издательскому делу. Научно-информационная деятельность. Основные термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > keyword
-
5 logical
- ХАРАКТЕРИСТИКИ И СРЕДСТВА, ОТНОСЯЩИЕСЯ К ЭЛЕМЕНТАМ ОБРАБОТКИ
- логический объект
- логический
логический
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
логический объект
Объект, рассматриваемый в аспекте определения алгоритмом или программой безотносительно к реализации с помощью технических средств.
[ ГОСТ 28397-89]Тематики
EN
ХАРАКТЕРИСТИКИ И СРЕДСТВА, ОТНОСЯЩИЕСЯ К ЭЛЕМЕНТАМ ОБРАБОТКИ
Logical
Объект, рассматриваемый в аспекте определения алгоритмом или программой безотносительно к реализации с помощью технических средств
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > logical
-
6 variable
- случайная величина
- переменная модели
- переменная (величина)
- переменная (в языках программирования)
- переменная
- величина
величина
То, что можно измерить, вычислить, сравнить, сопоставить, идентифицировать.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
- автоматизация, основные понятия
EN
переменная
Терм, который обозначает неконкретизированную сущность в проблемной области.
[ ГОСТ 34.320-96]Тематики
EN
переменная (в языках программирования)
Языковый объект, который может принимать различные значения.
[ ГОСТ 28397-89]Тематики
EN
переменная (величина)
параметр
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
EN
переменная модели
Переменная величина, включенная в модель и принимающая различные значения в процессе решения экономико-математической задачи. Независимые переменные принимают значения координат моделируемой системы; они могут быть управляемыми или сопутствующими (см. Конкомитантные факторы). Зависимые переменные (функции) выступают как результат решения задачи. Либо, наоборот, по желательному значению функции (функционала) критерия отыскивается в том или ином смысле соответствующее ему сочетание значений управляемых переменных (Оптимальный план). См. также Инструментальные переменные, Отклик. В экономико-математической терминологии такие термины как переменная, параметр, фактор, а также «величина» часто смешиваются, обозначая одно и то же. На деле, по-видимому, следует различать: а) переменную и параметр (как константу), б) переменную как элемент модели и фактор как источник воздействия на систему, отражаемый в переменной. Кроме того, наряду с термином «П.м.» часто используется, как равнозначный ему, термин «переменная системы». Однако, строго говоря, последний не имеет смысла: математическое понятие переменной (как и, например, константы) возникает лишь тогда, когда есть математическое описание системы, т.е. модель (см. также Координаты системы). В применении же к системе точнее были бы термины «характеристика«, «свойство«, «воздействие«. · Переменные, способные принимать некоторое ограниченное число значений (т.е. определенные на дискретных множествах) называются дискретными переменными. Наоборот, если переменная определена на непрерывном множестве и может принять любое в его границах значение — она называется непрерывной. Соответственно в процессе решения задачи используются следующие изменения природы переменной величины: рассмотрение переменной в качестве постоянной (константы), рассмотрение дискретной переменной как непрерывной, рассмотрение непрерывной переменной как дискретной. В зависимости от условий задачи подобные преобразования могут облегчать ее решение. В экономико-математических исследованиях используются не только математические переменные (как в приведенных случаях), но и логические переменные (см. например, Параметр целочисленных значений). В эконометрии также применяется взятый из математической статистики термин «объясняющие переменные» (см. Регрессия) — для обозначения независимых переменных (факторов) — как управляемых, так и сопутствующих. Объясняющие переменные могут быть как детерминированными, так и стохастическими.
[ http://slovar-lopatnikov.ru/]Тематики
EN
3.3.15 переменная (variable): Представление значения, которое должно принадлежать к определенному типу данных.
Источник: ГОСТ Р ИСО 13584-20-2006: Системы автоматизации производства и их интеграция. Библиотека деталей. Часть 20. Логический ресурс. Логическая модель выражений оригинал документа
25. Переменная (в языках программирования)
Variable
Языковый объект, который может принимать различные значения
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
3.5 случайная величина [(random) variable] X:Переменная, которая может принимать любое значение из заданного множества значений и с которой связано распределение вероятностей.
Примечание - Случайную величину, которая может принимать только отдельные значения, называют дискретной. Случайную величину, которая может принимать любые значения из ограниченного или неограниченного интервала, называют непрерывной.
Источник: ГОСТ Р ИСО 12491-2011: Материалы и изделия строительные. Статистические методы контроля качества оригинал документа
4.74 переменная (variable): Представление значения, которое должно принадлежать к определенному типу данных.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > variable
-
7 procedure
вмешательство
мера вмешательства
В области иммунизации под термином “interventions”, как правило, подразумеваются профилактические мероприятия.
[Англо-русский глоссарий основных терминов по вакцинологии и иммунизации. Всемирная организация здравоохранения, 2009 г.]Тематики
- вакцинология, иммунизация
Синонимы
EN
метод
Совокупность приемов и операций теоретич. или практич. познания (освоения) реального мира (явлений, про
цессов, вещ-в и т.п.), подчин. решению конкретных задач. В кач-ве м. могут выступать система операций при работе на определ. оборудовании, приемы научи, исследования и изложения материала, приемы отбора, обобщения и оценки материала с тех или иных позиций и т. д. Понятие м. восходит к началу практич. деятельности человека, изучает м. спец. наука — методология. Совр. система м. в еталлургии, как и др. отраслях науки и пром-ти, весьма разнообразна. Она включает, напр., м. эксперимента; м. обработки эмпирич. данных; м. построения научи, теорий и их проверки; м. изложения научных результатов; м. получения и исследования химич. и физич. св-в материалов; м. контроля кач-ва продукции и т. д.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
процедура
Упорядоченная совокупность взаимосвязанных определенными отношениями действий, направленных на решение задачи.
[МУ 64-01-001-2002]
процедура
Установленный способ осуществления деятельности или процесса.
Примечания
1. Процедуры могут быть документированными или недокументированными.
2. Если процедура документирована, часто используется термин "письменная процедура" или "документированная процедура". Документ, содержащий процедуру, может называться "процедурный документ".
[ ГОСТ Р ИСО 9000-2008]
процедура
Документ, содержащий шаги, которые предписывают способ выполнения деятельности. Процедуры определяются как части процессов. См. тж. рабочая инструкция.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
procedure
A document containing steps that specify how to achieve an activity. Procedures are defined as part of processes. See also work instruction.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
EN
процедура (в языках программирования)
Параметризуемый именованный программный блок, конкретное выполнение которого определяется вызовом процедуры.
[ ГОСТ 28397-89]Тематики
EN
процедуры
Предписание относительно того, какие действия предпринять в конкретной ситуации.
[ http://tourlib.net/books_men/meskon_glossary.htm]Тематики
EN
установленная схема
(напр. принятия решения, дежурства и т.д.)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
2.9 процедура (procedure): Установленный способ осуществления какого-либо вида деятельности или процесса ([4], подпункт 3.4.5).
Источник: ГОСТ Р ИСО 14971-2006: Изделия медицинские. Применение менеджмента риска к медицинским изделиям оригинал документа
3.19 процедура (procedure): Установленный способ осуществления какой-либо деятельности или процесса.
Примечание 1 - Процедура может быть документированной и недокументированной.
Примечание 2 - Соответствует определению ИСО 9000:2000, 3.4.5.
Источник: ГОСТ Р ИСО 14001-2007: Системы экологического менеджмента. Требования и руководство по применению оригинал документа
3.2 процедура (procedure): Установленный способ осуществления деятельности или процесса (см. 3.3).
Примечание
1 Процедуры могут быть документированными или недокументированными.
2 Если процедура документирована, часто используется термин «письменная процедура» или «документированная». Документ, содержащий процедуру, может называться «документированная процедура».
[см. 3.4.5 ИСО 9000]
Источник: ГОСТ Р ИСО 10005-2007: Менеджмент организации. Руководящие указания по планированию качества оригинал документа
3.23 процедура (procedure): Установленный способ выполнения какой-либо деятельности или процесса.
Примечание 1 - Процедура может быть документированной и не документированной.
Примечание 2 - Соответствует определению ИСО 9000:2000, пункт 3.4.5.
[ИСО 14001:2004, 3.19]
Источник: ГОСТ Р ИСО 14004-2007: Системы экологического менеджмента. Общее руководство по принципам, системам и методам обеспечения функционирования оригинал документа
2.30 процедура (procedure): Определенный способ осуществления мероприятия или процесса (2.31).
Примечание - Процедуры могут быть документированы или не документированы.
Источник: ГОСТ Р ИСО 24511-2009: Деятельность, связанная с услугами питьевого водоснабжения и удаления сточных вод. Руководящие указания для менеджмента коммунальных предприятий и оценке услуг удаления сточных вод оригинал документа
2.30 процедура (procedure): Определенный способ осуществления мероприятия или процесса (2.31).
Примечание - Процедуры могут быть документированы или не документированы.
Источник: ГОСТ Р ИСО 24512-2009: Деятельность, связанная с услугами питьевого водоснабжения и удаления сточных вод. Руководящие указания для менеджмента систем питьевого водоснабжения и оценке услуг питьевого водоснабжения оригинал документа
42. Процедура (в языках программирования)
Procedure
Параметризуемый именованный программный блок, конкретное выполнение которого определяется вызовом процедуры
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
3.19 процедура (procedure): Установленный способ осуществления какой-либо деятельности или процесса.
Примечание 1 - Процедура может быть документированной и недокументированной.
Примечание 2 - Соответствует определению ИСО 9000:2000, 3.4.5.
Источник: ГОСТ Р 54336-2011: Системы экологического менеджмента в организациях, выпускающих нанопродукцию. Требования оригинал документа
2.30 процедура (procedure): Определенный способ осуществления мероприятия или процесса (2.31).
Примечание - Процедуры могут быть документированы или не документированы.
Источник: ГОСТ Р ИСО 24510-2009: Деятельность, связанная с услугами питьевого водоснабжения и удаления сточных вод. Руководящие указания по оценке и улучшению услуги, оказываемой потребителям оригинал документа
3.4.5 процедура (procedure): Установленный способ осуществления деятельности или процесса (3.4.1).
Примечания
1 Процедуры могут быть документированными или недокументированными.
2 Если процедура документирована, часто используется термин «письменная процедура» или «документированная процедура». Документ (3.7.2), содержащий процедуру, может называться «процедурный документ».
Источник: ГОСТ ISO 9000-2011: Системы менеджмента качества. Основные положения и словарь
3.19 процедура (procedure): Установленный способ осуществления деятельности или процесса.
Примечание - Процедуры могут быть документированными или недокументированными.
[ИСО 9000:2005, пункт 3.4.5]
Источник: ГОСТ Р 54934-2012: Системы менеджмента безопасности труда и охраны здоровья. Требования оригинал документа
3.19 процедура (procedure): Установленный способ осуществления деятельности или процесса.
Примечание - Процедуры могут быть документированными или недокументированными.
[ ГОСТ Р ИСО 9000-2008, статья 3.4.5].
Источник: ГОСТ Р 54337-2011: Системы менеджмента охраны труда в организациях, выпускающих нанопродукцию. Требования оригинал документа
3.2 процедура (procedure): Установленный способ осуществления деятельности или процесса.
[ИСО 9000:2000, 3.4.5]1.
_____________
1 Здесь и далее приводятся ссылки на ИСО/МЭК 9000:2000 «Системы менеджмента качества. Основные положения и словарь».
Источник: ГОСТ Р ИСО/МЭК 17000-2009: Оценка соответствия. Словарь и общие принципы оригинал документа
3.2.32 процедура (procedure): Установленный способ осуществления деятельности или процесса.
Источник: ГОСТ Р 54147-2010: Стратегический и инновационный менеджмент. Термины и определения оригинал документа
4.2 процедура (procedure): Способ осуществления деятельности или процесса (6.4).
Примечание 1 - Процедуры могут документироваться или не документироваться.
Примечание 2 - Термин установлен в ИСО 9000:2006, статья 3.4.5.
[ИСО 14001:2004]
Источник: ГОСТ Р ИСО 14050-2009: Менеджмент окружающей среды. Словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > procedure
-
8 subscripting
индексация (в языках программирования)
Механизм для доступа к компоненте массива данных посредством ссылки на массив и посредством одного или более выражений, значения которых определяют позицию компоненты массива.
[ ГОСТ 28397-89]Тематики
EN
34. Индексация (в языках программирования)
Subscripting
Механизм для доступа к компоненте массива данных посредством ссылки на массив и посредством одного или более выражений, значения которых определяют позицию компоненты массива
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > subscripting
-
9 label
- этикетка
- характеризовать
- табличка
- присваивать обозначение
- прикреплять бирку
- пояснительные подписи на карте
- помечать
- обозначать
- метка [радиоактивная]
- метка (в языках программирования)
- метка (в электросвязи)
- метка
- маркировочный знак
метка
(маркировочный) знак
отметка
обозначение
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
метка
маркер
Служебная часть файла или сообщения; логический идентификатор, который описывает тип, размер и время создания передаваемой информации и не имеет самостоятельного значения.
См. external -, flow ~, header ~, interior ~, routing ~, trailer ~.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
Синонимы
EN
метка (в языках программирования)
Языковая конструкция, употребляемая для именования предложения в программе.
[ ГОСТ 28397-89]Тематики
EN
метка [радиоактивная]
Радиоактивный атом (3Н, 32P и др.) или пригодный для идентификации биохимическими или иммунологическими методами иной лиганд (например, флуоресцентная М.), внедряемый в макромолекулу; используется в значительном числе цитологических, цито- и гистохимических и цитогенетических методов.
[Арефьев В.А., Лисовенко Л.А. Англо-русский толковый словарь генетических терминов 1995 407с.]Тематики
EN
обозначать
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
пояснительные подписи на карте
пояснительные подписи
Подписи, поясняющие вид или род объектов карты, а также их количественные и качественные характеристики.
[ ГОСТ 21667-76]Тематики
Обобщающие термины
- свойства, элементы карты и способы картографического изображения
Синонимы
EN
прикреплять бирку
наклеивать этикетку
прикреплять ярлык
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
присваивать обозначение
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
этикетка
Средство информации об упакованной продукции и ее изготовителе, располагаемое на самой продукции, на листе-вкладыше или на ярлыке, прикрепляемое или прилагаемое к упаковочной единице.
Примечание
Этикетка небольших размеров, содержащая дополнительные сведения о продукции и расположенная на противоположной стороне от основной этикетки, называется контрэтикеткой.
[ ГОСТ 17527-2003]
этикетка
Ярлык на каком-либо товаре с указанием названия, цены и т.д.
[МУ 64-01-001-2002]Тематики
- производство лекарственных средств
- упаковка, упаковывание
Обобщающие термины
EN
DE
FR
46. Метка (в языках программирования)
Label
Языковая конструкция, употребляемая для именования предложения в программе
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > label
-
10 asynchronous procedure
асинхронная процедура
Процедура в языке программирования, выполняемая логически параллельно с другими частями программы.
[ ГОСТ 28397-89]Тематики
EN
Asynchronous procedure
Процедура в языке программирования, выполняемая логически параллельно с другими частями программы
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > asynchronous procedure
-
11 program
- управляемый с помощью меню
- программировать
- программа (ЭВМ)
- программа
- осуществление программы
- Основные понятия
- задавать последовательность операций
задавать последовательность операций
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
осуществление программы
реализация программы
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
программа
Данные, предназначенные для управления конкретными компонентами системы обработки информации в целях реализации определенного алгоритма.
[ ГОСТ 19781-90]
[ ГОСТ 28806-90]
[ ГОСТ 28397-89]
программа
Ряд проектов и видов деятельности, которые планируются и управляются вместе для достижения общего набора связанных целей и прочих конечных результатов.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
программа
1. См. Комплексная народнохозяйственная программа. 2. В кибернетике (главным образом технической) — основной элемент программного управления, строго определенная последовательность действий, предписанная объекту управления. В частности, машинная П. — алгоритм задачи, записанный таким образом, чтобы ее можно было решить на электронной вычислительной машине. Запись ведется на одном из языков программирования как последовательность команд (операторов), указывающих, в каком порядке, с какими данными и какие надо проводить элементарные операции. Известно, что одну и ту же задачу можно решать разными методами. При составлении П. выбирают те способы решения, которые быстрее приводят к результату.
[ http://slovar-lopatnikov.ru/]EN
programme
A number of projects and activities that are planned and managed together to achieve an overall set of related objectives and other outcomes.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
- информационные технологии в целом
- качество программных средств
- обеспеч. систем обраб. информ. программное
- экономика
- языки программирования
EN
программа (ЭВМ)
Описание действий на языке программирования или в машинном коде.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
программировать
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
управляемый с помощью меню
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
11. Программа
Program
По ГОСТ 19781
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
1. Программа
Program
Данные, предназначенные для управления конкретными компонентами системы обработки информации в целях реализации определенного алгоритма
Источник: ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > program
-
12 assignment
- распределение (ресурсов)
- присвоение адреса
- присваивание
- предоставление ресурсов
- предоставление пользователю ресурса нумерации
- переуступка
- назначение (в криптографии)
- закрепление
закрепление
ассигнование
распределение
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
назначение
распределение
—
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
Синонимы
EN
переуступка
(напр. лицензии, прав на результаты работ и т.п.)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
предоставление пользователю ресурса нумерации
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
предоставление ресурсов
выделение ресурсов
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
присваивание
Механизм придания значения переменной в языке программирования.
[ ГОСТ 28397-89]Тематики
EN
присвоение адреса
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
распределение (ресурсов)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
36. Присваивание
Assignment
Механизм придания значения переменной в языке программирования
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > assignment
-
13 function (procedure)
процедура-функция
функция
Процедура в языке программирования, при выполнении которой вырабатывается значение, связываемое с именем процедуры.
[ ГОСТ 28397-89]Тематики
Синонимы
EN
43. Процедура-функция Функция
Function (procedure)
Процедура в языке программирования, при выполнении которой вырабатывается значение, связываемое с именем процедуры
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > function (procedure)
-
14 activation
- напольное устройство для подключения
- возбуждение, включение, запуск
- активизация процедуры
- активизация (в информационных технологиях)
- активация основного покрываемого металла (подслоя)
- активация (в электросвязи)
- активация (в металлургии)
- активация
активация
(образование радионуклидов под действием излучений)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
активация
Интенсификация физ.-хим. процессов выведением систем из стабильного состояния воздействием на параметры процесса, на физ. или хим. состояние материала. Средствами воздействия (активирования) могут быть термоактивация, механич. удар или трение (механоактивация, трибохимия), радиоакт. излучения, электромагаитное поле, дуговые и искровые разряды, УЗ и т. д., а также предварит, хим. обработка, иногда сочетаемая с физ. воздействиями (напр., механо-хим. модификация минералов - частичное или полное превращение одного минерала в другой при обработке реагентом в процессе измельчения). А., как правило, сопровождается изменением термодинамического состояния вещ-ва, в частности увеличением запаса энергии, к-рая выделяется при хим. взаимодействии. Запас энергии вещ-ва повышается в ходе или после его а. в результате фазовых и структурных изменений, образования возбужд. молекул или распада на радикалы, ион-радикалы, из которых могут образоваться молекулы и др. продукты, с повыш. реакц. способностью.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
активация
Процедура программирования встроенного ПЗУ сотовых телефонов и пейджеров перед выдачей их абоненту; обычно осуществляется с помощью компьютера или специального устройства, называемого программатором. См. voice ~.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
активация основного покрываемого металла (подслоя)
Ндп. декапирование
Обработка поверхности основного покрываемого металла (подслоя) в растворах химическим или электрохимическим способом для снятия окисного слоя непосредственно перед получением покрытия.
[ГОСТ 9.008-82]Недопустимые, нерекомендуемые
Тематики
- покрытия металл. и неметалл.
EN
DE
FR
активизация
Процесс приведения объекта в состояние готовности выполнять возложенные на него функции.
[ http://www.morepc.ru/dict/]
активизация
Приведение технических и программных средств в активное состояние, например, путем подачи питания (запуска) устройства или загрузки программы в основную память.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
EN
активизация процедуры
Приведение процедуры в состояние готовности к выполнению при ее вызове.
[ ГОСТ 28397-89]Тематики
EN
возбуждение, включение, запуск
—
[В.А.Семенов. Англо-русский словарь по релейной защите]Тематики
EN
напольное устройство для подключения
Специальное устройство, предназначенное для установки электрических аппаратов и электроустановочных изделий, применяемое в напольных, устанавливаемых под полом и заподлицо с полом системах.
[ ГОСТ Р МЭК 61084-1 2007]
напольное устройство для подключения
-
[IEV number 442-02-42]EN
floor service unit
specific apparatus mounting device used when installing a floor system
[IEV number 442-02-42]FR
bloc de distribution au plancher
dispositif de montage d'appareil spécifique utilisé pour les systèmes installés au plancher
[IEV number 442-02-42]
Рис. THORSMAN
Напольное устройство для подключения, установленное заподлицо с полом
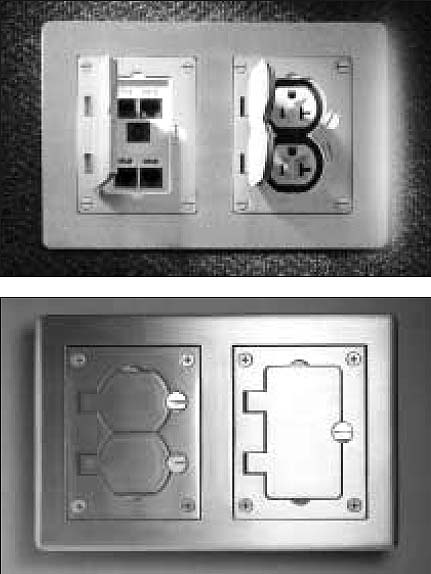
Рис. Wiremold/Legrand
Напольное устройство для подключения, установленное заподлицо с полом
Параллельные тексты EN-RU
An Activation for Every Application!
The Walkerduct Pro Series System offers a complete range of service fittings to meet all power, data and communication requirements.
The flush service fittings are available in brushed aluminum, brass and nonmetallic finishes for single-, double- and triple-duct runs.
Fittings are available for feeding directly out of the underfloor duct preset while keeping the connections to a minimum visibility.
[Wiremold/Legrand]Напольные устройства подключения для любых применений!
Система Walkerduct Pro Series System содержит полный комплект напольных устройств для подключения, допускающих встраивание любых электрических и телекоммуникационных розеток.
В состав серии входят алюминиевые (с матовой поверхностью), латунные и пластмассовые устанавливаемые заподлицо с полом устройства, соединяемые с одно-, двух- и трехканальными коробами.
Кабели попадают в напольные устройства непосредственно из расположенных под чистым полом специальных (глухих) коробов через закрепленные на них монтажные коробки. При этом напольные устройства остаются практически незаметными.
[Перевод Интент]
Тематики
- изделие электромонтажное
- электропроводка, электромонтаж
EN
DE
FR
Activation
Приведение процедуры в состояние готовности к выполнению при ее вызове
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
23. Активация
Иди. Декапирование I). Aktivicrung
E. Activation
F. Activation
Обработка поверхности основного металла или подслоя для снятия окисного слоя непосредственно перед нанесением покрытия
Источник: ГОСТ 9.008-73: ЕСЗКС. Покрытия металлические и неметаллические неорганические. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > activation
-
15 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
16 identifier
идентификатор
Имя собственное, используемое как дескриптор.
Примечание
Это слово может быть, например, именем проекта, лица или группы, фирменным наименованием, географическим названием, аббревиатурой или сиглой
[ГОСТ 7.74-96]
идентификатор
Литерная цепочка, выступающая в определенном контексте в роли символа.
Примечание
В обработке данных рассматривают идентификаторы порций данных, областей памяти, пространств памяти, томов и др., при этом они могут выражать определенные свойства этих объектов.
[ ГОСТ 19781-90]
[ ГОСТ 28397-89]
идентификатор
(ITIL Service Operation)
Уникальное имя, используемое для идентификации пользователя, человека или роли. Идентификатор используется для предоставления прав пользователю, человеку или роли. Пример идентификаторов – имя пользователя «i_ivanov» или роль «Менеджер изменений».
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]
идентификатор
В информатике специальное наименование, имя элементарных данных, массивов данных, программ или других объектов, которые запрашиваются, обрабатываются и выдаются на выход ЭВМ. Для переменных величин (данных) требуется четко различать имя и значение величины (например, имя переменной x, значение — 0, 1, 2, и т.д.); для постоянной величины само ее значение может служить идентификатором. См. также Показатель.
[ http://slovar-lopatnikov.ru/]EN
identity
(ITIL Service Operation)
A unique name that is used to identify a user, person or role. The identity is used to grant rights to that user, person or role. Example identities might be the username SmithJ or the role ‘change manager’.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
- информационно-поисковые языки
- информационные технологии в целом
- обеспеч. систем обраб. информ. программное
- экономика
- языки программирования
EN
DE
FR
определитель номера
идентификатор
имя
признак
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
2.18 идентификатор (identifier): Информационный объект, используемый для объявления идентичности до потенциального подтверждения соответствующим аутентификатором [18].
4.24 идентификатор (identifier): Уникальная строка данных, используемая в биометрической системе в качестве ключа для сопоставления биометрических данных личности с приписанной личности идентификационной информацией.
Источник: ГОСТ Р ИСО/МЭК 24713-2-2011: Информационные технологии. Биометрия. Биометрические профили для взаимодействия и обмена данными. Часть 2. Контроль физического доступа сотрудников аэропортов оригинал документа
Identifier
По ГОСТ 19781
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
77. Идентификатор
Identifier
Литерная цепочка, выступающая в определенном контексте в роли символа.
Примечание. В обработке данных рассматривают идентификаторы порций данных, областей памяти, пространств памяти, томов и др., при этом они могут выражать определенные свойства этих объектов
Источник: ГОСТ 19781-90: Обеспечение систем обработки информации программное. Термины и определения оригинал документа
4.35 идентификатор (identifier): Символ или группа символов, составляющих значение элемента данных, используемое для идентификации или именования объекта и, возможно, для указания определенных свойств объекта.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > identifier
17 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
18 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
19 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
20 automatic storage allocation
автоматическое распределение памяти
Выделение памяти при входе в программный блок для локальных переменных и ее освобождение при выходе из этого блока.
[ ГОСТ 28397-89]Тематики
EN
38. Автоматическое распределение памяти
Automatic storage allocation
Выделение памяти при входе в программный блок для локальных переменных и ее освобождение при выходе из этого блока
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > automatic storage allocation
См. также в других словарях:
языки программирования — формальные языки для описания данных (информации) и алгоритма (программы) их обработки на ЭВМ. Основу языков программирования составляют алгоритмические языки. Первыми языками программирования были машинные языки, представляющие собой системы… … Энциклопедический словарь
языки программирования — формальный язык для описания данных (информации) и алгоритма (программы) их обработки на компьютере. Основу языков программирования составляют алгоритмические языки. Первыми языками программирования были машинные языки, представляющие собой… … Энциклопедия техники
ЯЗЫКИ ПРОГРАММИРОВАНИЯ — ЯЗЫКИ ПРОГРАММИРОВАНИЯ, формальные языки для описания данных (информации) и алгоритма (программы) их обработки на ЭВМ. Основу языков программирования составляют алгоритмические языки. Первыми языками программирования были машинные языки,… … Современная энциклопедия
ЯЗЫКИ ПРОГРАММИРОВАНИЯ — формальные языки для описания данных (информации) и алгоритма (программы) их обработки на ЭВМ. Основу языков программирования составляют алгоритмические языки. Первыми языками программирования были машинные языки, представляющие собой системы… … Большой Энциклопедический словарь
Языки программирования — ЯЗЫКИ ПРОГРАММИРОВАНИЯ, формальные языки для описания данных (информации) и алгоритма (программы) их обработки на ЭВМ. Основу языков программирования составляют алгоритмические языки. Первыми языками программирования были машинные языки,… … Иллюстрированный энциклопедический словарь
Языки программирования — (алгоритмические языки) класс искусственных языков, предназначенных для обработки информации с помощью вычислительных машин. Тексты на Я. п. являются предписаниями по обработке последовательностей символов (в частности, записей чисел); все… … Лингвистический энциклопедический словарь
Языки программирования — Язык программирования формальная знаковая система, предназначенная для записи программ. Программа обычно представляет собой некоторый алгоритм в форме, понятной для исполнителя (например, компьютера). Язык программирования определяет набор… … Википедия
Языки программирования с ключевыми словами не на английском — Языки программирования, основанные не на английском языке такие языки программирования, которые, в отличие от большинства распространенных языков, не используют ключевые слова, взятые из английской лексики. Содержание 1 Преобладание языков… … Википедия
Языки программирования, основанные не на английском — языке такие языки программирования, которые, в отличие от большинства распространенных языков, не используют ключевые слова, взятые из английской лексики. Содержание 1 Преобладание языков программирования, основанных на английском … Википедия
Языки программирования c ключевыми словами не на английском — Языки программирования, основанные не на английском языке такие языки программирования, которые, в отличие от большинства распространенных языков, не используют ключевые слова, взятые из английской лексики. Содержание 1 Преобладание языков програ … Википедия
ЯЗЫКИ ПРОГРАММИРОВАНИЯ ВЫСОКОГО УРОВНЯ — ЯЗЫКИ ПРОГРАММИРОВАНИЯ ВЫСОКОГО УРОВНЯ, ЯЗЫКИ ПРОГРАММИРОВАНИЯ, приемлемо близкие к разговорному языку. Высокоуровневый язык программирования преобразуется КОМПИЛЯТОРОМ в машинные коды, используемые непосредственно компьютером. Большинство… … Научно-технический энциклопедический словарь
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский